Spatial Action Maps and FlingBot for Cloth Unfolding
Published:
by
Chia-Hsien (Cathy) Shih
![]()
- Categories:
- Applications 7
Dynamic manipulation
- e.g. fling and throw motions in daily life
- why dynamic manipulation?
- efficient (high velocity)
- expand physical reach range
- → single-arm quasi-static actions
- require more interactions for bad initial configurations (crumpled clothes)
- limit maximum cloth size
- goal: use dual-arm robot to unfold from arbitrary initial configurations
- method
- self-supervised learning
- primitives: pick → stretch → fling
- result
- novel rectangular cloths (require only 3 actions to reach 80% coverage)
- clothes larger than system's reach range
- T-shirts
- real-world transfer → 4x coverage than the quasi-static baseline
Related work
- quasi-static manipulation → pick and drag actions
- friction models
- hard to estimate in real life
- hard to be derived from visual inputs
- reinforcement learning with expert demonstrations
- identify key points (wrinkles, corners, and/or edges)
- limitation: can not handle severely self-occluded configurations (crumpled clothes)
- self-supervised learning
- unfold → factorized pick and place actions
- folding → goal conditioned using spatial action maps
- friction models
- → key differences in this work
- visual input → no need of ground truth (motion capturing system)
- self-supervised → no need of expert
Method
- given two appropriate grasp points, the motion primitives should be sufficient for single
step unfolding when possible
- pick at two locations L, R with two arms → only problem here
- stretch (unfold in one direction)
- lift the cloth to 0.30m and stretch the cloth taut in between them
- fling (unfold in the other direction)
- fling the cloth forward 0.70m at 1.4m s−1 then pull backwards 0.50m at 1.4m s−1
- advantages
- a simpler policy (fling action can effectively unfold many clothes) which generalizes better to different cloth types
- reach higher coverages in smaller numbers of interactions
- manipulate clothes larger than the system’s reach range
- problem constraints
- two picking points L and R are in R^2 because we know depth
- two pixels from visual inputs
- L is left of R
- grasp width has to satisfy system limit and safe distance
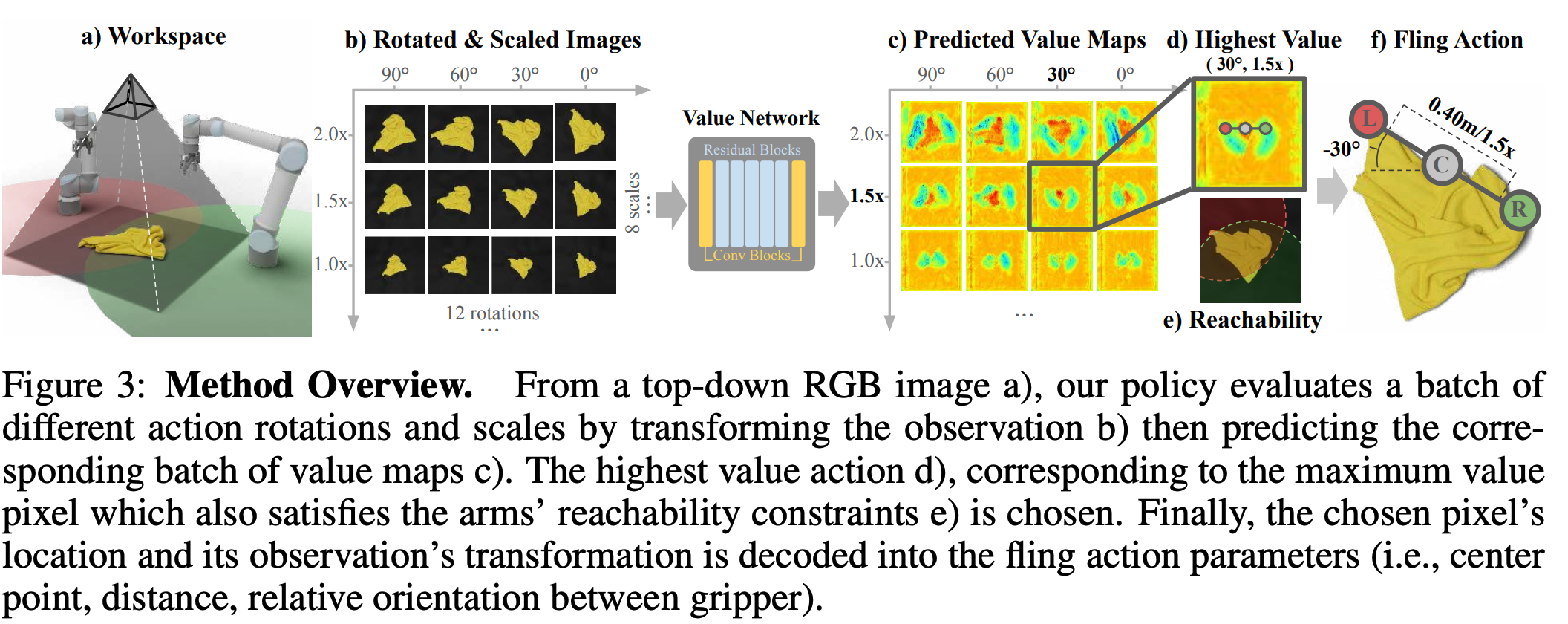
- → parameterize with center point (C_x, C_y) and angle (theta) between -90 to 90 and grasp width (w)
- two picking points L and R are in R^2 because we know depth
- value function
- spatial action maps → recover values with varying scales and rotations in real-world space by varying the transformation applied to the visual inputs
- visual input → batch of rotated and scaled data (predefined values) → predict batch of value maps
- value map
- each pixel value corresponds to the action value of that location (pixel index), rotations and scales.
- predict the difference in coverage before and after the action
- pick action based on the highest values among the maps (to get max coverage)
- spatial action maps → recover values with varying scales and rotations in real-world space by varying the transformation applied to the visual inputs
- self-supervised learning
- train end-to-end in simulation → finetune in the real world
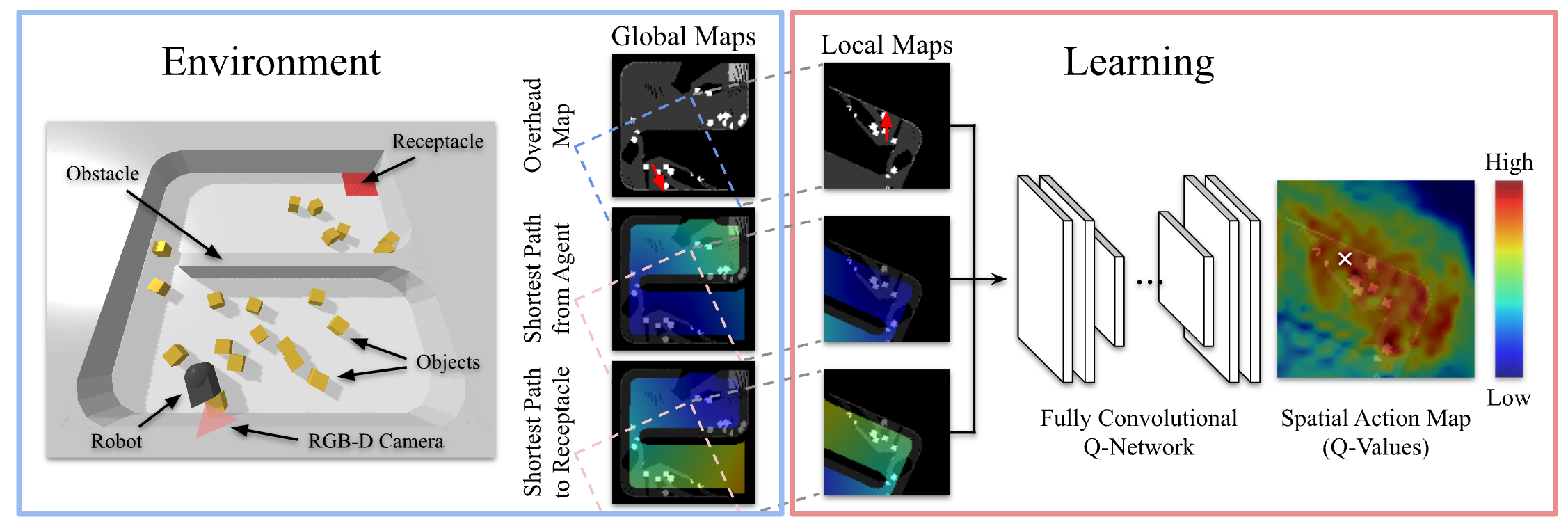
Spatial action map
- state:
- robot is positioned in the center of each image and looking along the y axis
- 4-channel image (robot's own visual observations, GPS coordinates,
local mapping, and task-related goal coordinates)
- local observation (overhead image or reconstructed env)
- robot position (masked image)
- heatmap of the shortest path dist from agent to the pixel location
- heatmap of the shortest path dist from receptacle to the pixel location
- action:
- pixel location in the action map &rarrl robot’s desired locations
- a movement primitive is used to execute the move
- limitations
- high-level motion primitives
- limit to tasks in 2D space
[1] Ha, Huy, and Shuran Song. "Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfolding." Conference on Robot Learning. PMLR, 2022.
[2] Wu, Jimmy, et al. "Spatial action maps for mobile manipulation." arXiv preprint arXiv:2004.09141 (2020).