Iterative residual policy for dynamic manipulation
Published:
by
Chia-Hsien (Cathy) Shih
![]()
- Categories:
- Applications 7
Dynamic manipulation of deformable objects
- complex dynamics (introduced by object deformation and high-speed action)
- strict task requirements (defined by a precise goal specification)
- rope whipping
- action space: target angles for two joints and angular velocity across all joints
- observation space
- tip trajectory as an image
- The pixel values correspond to occupancy probability
- the observed trajectories have a binary pixel
- the predicted trajectories are real-valued: between 0 to 1
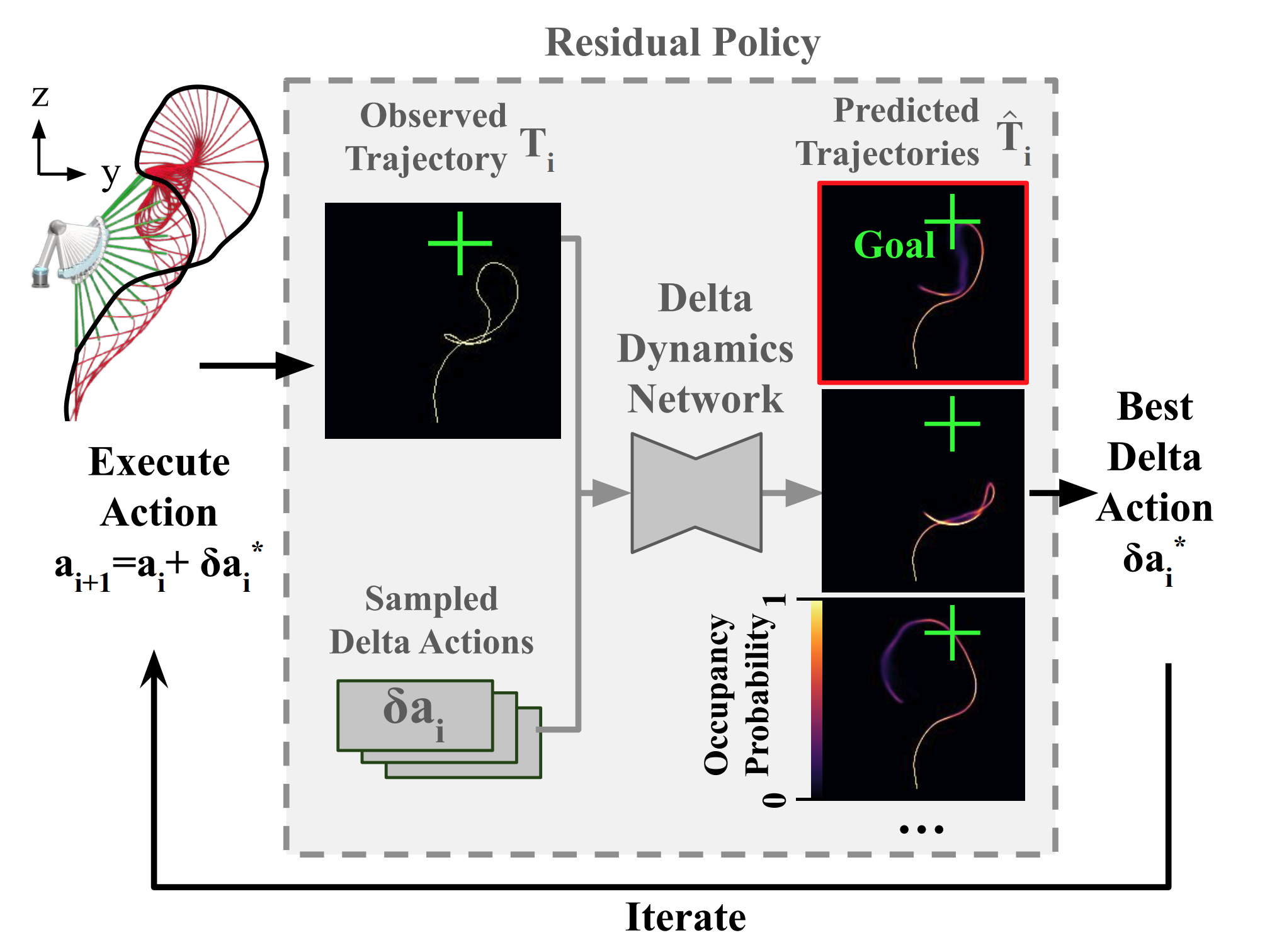
Iterative Residual Policy (IRP)
- learns delta dynamics that predict the effects of delta action on the previously-observed trajectory
- metric for picking action from the predicted trajectories: min distance from any point of the tip trajectory to the goal location
- loss to train the prediction model: Binary Cross Entropy Loss of the predicted trajectory and the true trajectory with delta actions
- sample actions with a uniform distribution and delta actions with a gaussian distribution
My thoughts on IRP
- The approach still follows the concept of learning world dynamics (states + action → next states)
- train a model to predict trajectories well, and choose actions based on this
- The key differences make it useful for apply the framework to unseen environments or agents
- delta actions effectively capture the effect of the changes in actions
- (even without delta actions, the iterative or the sampling parts of the method can both still be applied)
- similar to the concept of using velocity in the states instead of previous location
- whole trajectory prediction instead of step-by-step prediction
- → this makes it easy to set the criteria for picking the best action for the next iteration
- this limits the applications on repeatable tasks with complex dynamic
- delta actions effectively capture the effect of the changes in actions
[1] Chi, Cheng, et al. "Iterative residual policy: for goal-conditioned dynamic manipulation of deformable objects." arXiv preprint arXiv:2203.00663 (2022).