Dynamic models and manipulation for soft manipulators
Published:
by
Chia-Hsien (Cathy) Shih
![]()
- Categories:
- Applications 7
dynamic models for soft continuum manipulators
- integral lagrangian formulation [1]
- derive a dynamic model for a variable length multi-section continuum arm with N sections
- modal kinematics -> integral Lagrangian for single section -> piece-wise formulation
- integral Lagrangian formulation
- Assuming continuum sections are made up of infinitesimally thin slices,
- first the kinetic energy (KE) and potential energy (PE) are derived for a thin slice
- then the total energies are found by integrating along the length of the arm
- The Lagrangian is then utilized to derive the continuum arm equations of motion.
- limitation
- closed-form expressions
- complicated as the number of segments increases
- unpractical for real-time applications
- numerical instabilities
- derive a dynamic model for a variable length multi-section continuum arm with N sections
- lumped mass assumption [2]
- acceleration-level control in joint space based on a dynamic model of a constant curvature continuum manipulator with multiple sections.
- spatial dynamic model (describe the motion of a physical system in three-dimensional space) → one mass point per section.
- feedback linearization (transforming the nonlinear system into a linear system by using feedback)
- decouple the nonlinear couplings between the actuators such that fast trajectories can be tracked
- acceleration-level control in joint space based on a dynamic model of a constant curvature continuum manipulator with multiple sections.
- curvature space methods+inverse kinematic approaches [3]
- use kinematic models for controlling the spatial location and trajectory of the manipulator's end effector
- solve the three chamber lengths from the given position → control pressure to make the arm to follow trajectories
- use kinematic models for controlling the spatial location and trajectory of the manipulator's end effector
- RNN [4]
- reduce the dynamic model of a soft robot to first-order dynamical equation owing to their high damping and low inertial properties, as typically observed in nature, with minimal loss in accuracy
- can be powerful for developing closed-loop task-space dynamic controllers for soft robots by simplifying the planning and sensory feedback process
- use a nonlinear autoregressive exogenous (NARX) model, a kind of recurrent neural network
- receives only zeroth-order feedback for the first-order model
- receives the appended first-order feedback for the second-order model
- approximation with augmented rigid body model
- piecewise constant curvature (PCC) model by adding a rigid link model and mass points
- task space control
- quasistatic assumption
- tip-follower actuation using local kinematics
- by deriving locally approximated Jacobian from a model or learned
- no gravity / inertia
- no quick movements and skillful force application, as the actuation steps must be kept small to prevent the robot from oscillating.
- tip-follower actuation using local kinematics
- dynamic approaches
- dynamic model
- Material model-based closed-loop trajectory control [5]
- The continuum manipulator is treated as a composite material, and a modified nonlinear Kelvin-Voigt material model is utilized to embody the visco-hyperelastic dynamics of soft silicone.
- The Lagrangian approach is applied to derive the equation of motion of the manipulator
- Position regulation [6]
- use integral action to model the uncertain kinematics of the manipulators
- estimate the static mapping of a single coordinate (in-plane tip rotation) in Cartesian space is extended to the 3D case by considering the out-of-plane tip rotation
- employ a port-Hamiltonian formulation and a passivity-based approach to compensate the effect of unknown external forces acting on the tip of the manipulation
- model and control in terms of energy exchange by representing the dynamics using a Hamiltonian function
- describes the system's energy
- how the system's energy changes over time
- model and control in terms of energy exchange by representing the dynamics using a Hamiltonian function
- use integral action to model the uncertain kinematics of the manipulators
- sliding mode controller [7]
- Slotine-Li Adaptive Control Scheme
- an adaptive control method that enables the controller to estimate the dynamic coefficients (mass, inertia, and friction properties) of the robot online.
- difficult to measure accurately
- vary with time due to changes in the robot's configuration or environment
- uses feedback from the robot's joint positions and velocities to estimate these dynamic coefficients
- adjust the controller in real-time accordingly
- an adaptive control method that enables the controller to estimate the dynamic coefficients (mass, inertia, and friction properties) of the robot online.
- Adaptive Approach for Estimating Unknown Disturbance Bounds:
- monitor the output of the controller and adjusting the bounds of the disturbances based on how much the output deviates from the desired behavior
- Terminal Sliding Mode Control Strategy
- sliding mode control is a type of nonlinear control strategy that aims to drive the system to a desired state by creating a sliding surface that the system's state trajectory must follow
- terminal sliding mode control
- ensure that the sliding surface is reached in a finite amount of time → reduce the time required to achieve the desired state
- increase the convergence rate of the tracking error
- Slotine-Li Adaptive Control Scheme
- Material model-based closed-loop trajectory control [5]
- dynamic model
- quasistatic assumption
Dynamic manipulation of soft manipulators[8]
- Goal: build a dynamic approach to control and modeling that allows soft robots to move faster and handle external forces more efficiently.
- Motivation:
- The maximum velocity that can be achieved through dynamic control is dependent on
- speed of the motion tracking system, the accuracy of the PCC-based model, and the time required for computation.
- On the other hand, quasi-static controllers are inherently slower and cannot achieve high velocities.
- The maximum velocity that can be achieved through dynamic control is dependent on
Methods and results
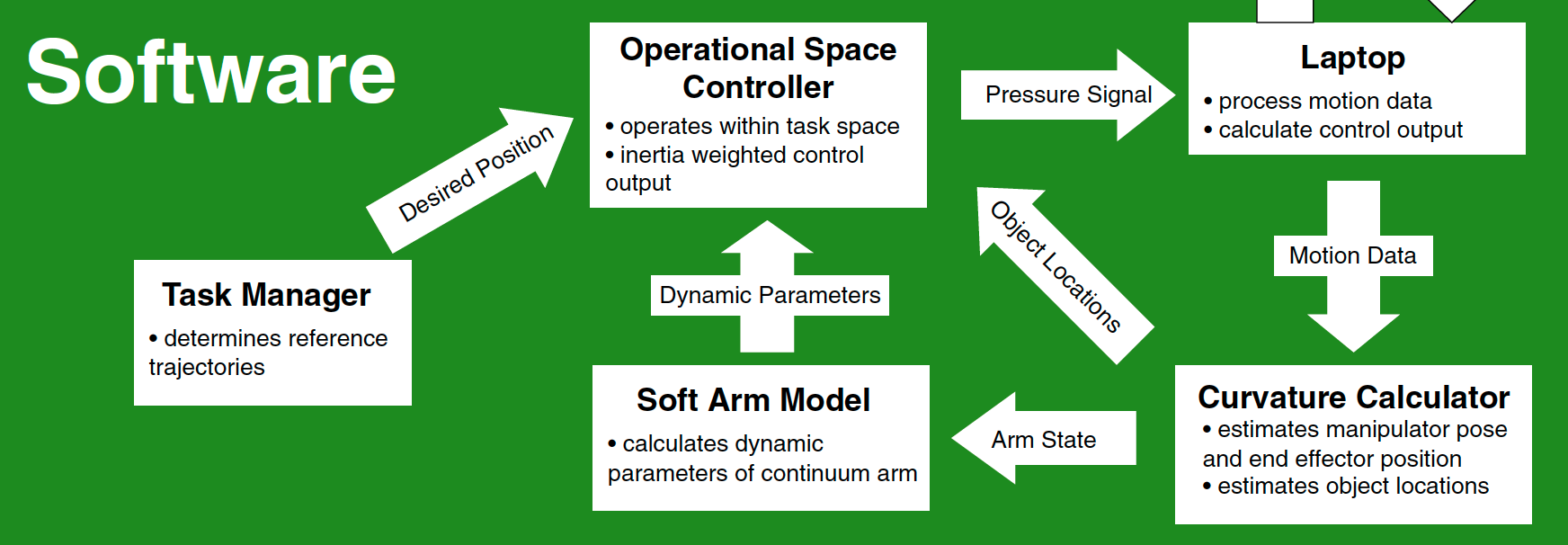
- Combine dynamic modeling, dynamic task space control, and system identification methods to experimentally validate the integration of these elements on a real-world soft manipulator.
- Improve the accuracy of the dynamic model of the multisegment continuum robot by adding experimentally determined error correction terms to actuation and stiffness matrices.
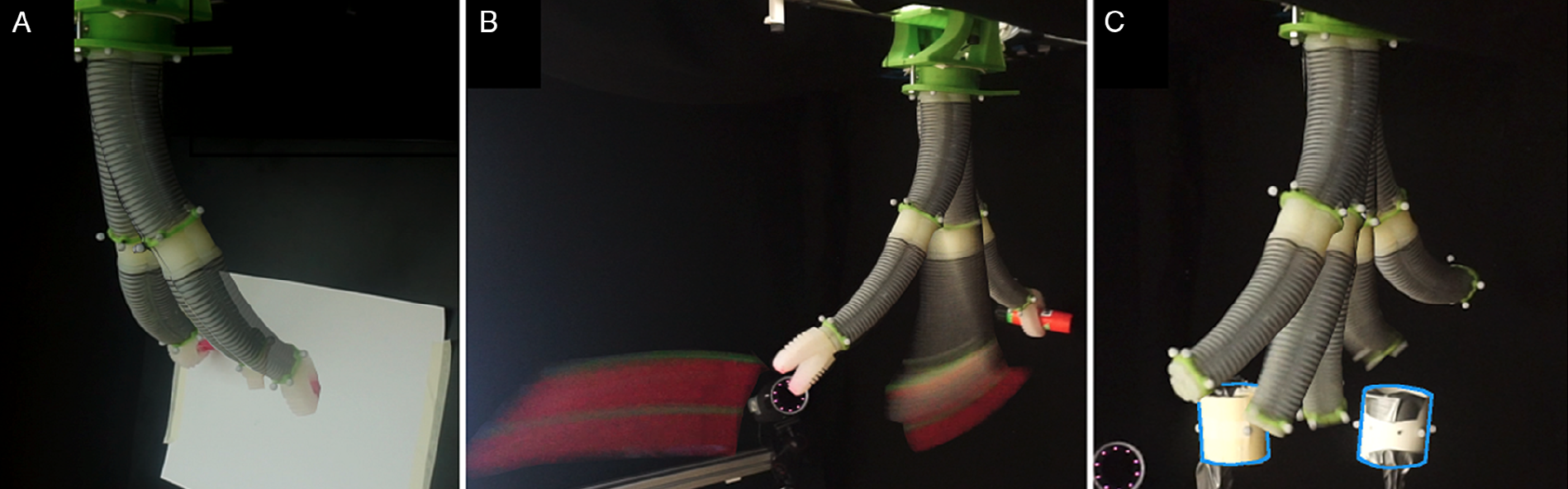
- Experiments (dynamically control motions in 3D task space)
- Pick-and-place: the manipulator moves at a higher velocity than possible with quasistatic control, and handles a load while moving toward the drop-off spot.
- Throwing objects: perform velocity control to stabilize after reaching a high speed with the improved dynamic model
- Drawing a straight line: use the dynamic model to apply tip forces and follow given trajectories
 —
—
Limitations
- workspace
- increase workspace by replacing the joint at the base
- online programming of the actuation behavior
- PCC assumptions
- Cosserat rod model instead -> hard to model for control with the nonconstant curvature approaches
- improved kinematic models to improve estimation of nonlinear actuation and stiffness behavior
- improced accuracy will give opportunityies for model predictive control
- experimentally determined error correction terms for dynamic model -> system identification of every manipulator
- analyze errorr sources -> anisotropic stiffness, wall thickness, manufacturing quality
- couple with FEM for better state estimation
- heavily rely on motion capture system
- cheaper options: embedded bend sensors, inertial measurement units for state estimation
[1] Godage, Isuru S., et al. "Dynamics for variable length multisection continuum arms." The International Journal of Robotics Research 35.6 (2016): 695-722.
[2] Falkenhahn, Valentin, et al. "Model-based feedforward position control of constant curvature continuum robots using feedback linearization." 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2015.
[3] Gong, Zheyuan, et al. "A soft manipulator for efficient delicate grasping in shallow water: Modeling, control, and real-world experiments." The International Journal of Robotics Research 40.1 (2021): 449-469.
[4] George Thuruthel, Thomas, Federico Renda, and Fumiya Iida. "First-order dynamic modeling and control of soft robots." Frontiers in Robotics and AI 7 (2020): 95.
[5] Mustaza, Seri Mastura, et al. "Dynamic modeling of fiber-reinforced soft manipulator: A visco-hyperelastic material-based continuum mechanics approach." Soft robotics 6.3 (2019): 305-317.
[6] Franco, Enrico, et al. "Position regulation in Cartesian space of a class of inextensible soft continuum manipulators with pneumatic actuation." Mechatronics 76 (2021): 102573.
[7] Kazemipour, Amirhossein, et al. "Adaptive dynamic sliding mode control of soft continuum manipulators." 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022.
[8] Fischer, Oliver, et al. "Dynamic Task Space Control Enables Soft Manipulators to Perform Real‐World Tasks." Advanced Intelligent Systems 5.1 (2023): 2200024.